
SPUDNIK-1
COMMAND & CONTROL SIMULATION


MAGNETORQUERS
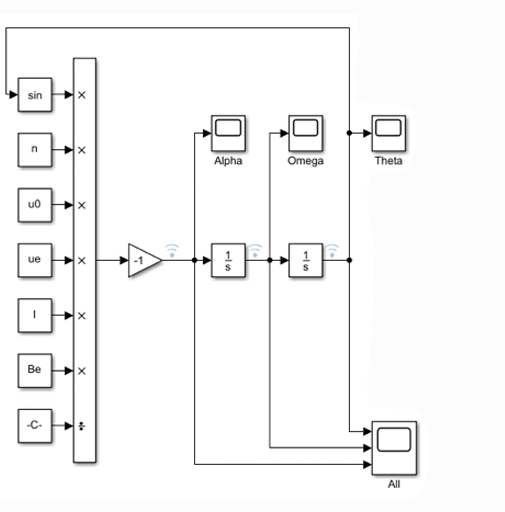
To gain insight into how a magnetorquer would theoretically behave in space-like conditions a simulation was developed using Simulink software. This simulation represents a single electromagnet’s motion reaction to either a steady current input or by PID (Proportional, Integral, Derivative) controlled current input. The results from this simulation showed that with steady current input and a non-zero initial position a magnetorquer will oscillate indefinitely. However, a magnetorquer can be forced to achieve steady-state with zero error using simple PI control. This information helps us to characterize the magnetorquer component of the CubeSat’s attitude control subsystem.


REACTION WHEELS
The reaction wheel simulation was made in order to verify that the flywheel design and motor selection would provide the desired response. The three major factors which were taken into account in the simulation would be: the inertial resistance of the flywheel (or its desire to keep rotating at the speed that it is currently rotating at), the characteristics of the selected motor, and the inertial resistance of the rest of the CubeSat; once these factors were taken into account, a control logic, which manipulates the motor in order to move the satellite to the desired rotation, was implemented and tuned in order to get the fastest possible response time with minimal overshoot in terms of rotational position. During the conceptual design phase of the project, it was determined that a reasonable response time would be 30 seconds to rotate the CubeSat by 180°.